



广州诚敏电子科技有限公司专业优势供应日本横河UT全系列温控器/调节仪!部分型号现货!
刘先生:13609003160
电话:020-85164329
传真:020-37038509
QQ:2637967236/1783782945
UT32A
1)网络功能:
Ethernet(Modbus/TCP) RS-485(Modbus/RTU,P2P(点对点),Coordinated(协调运行)、PC-link) PROFIBUS-DP
2)简单明了:
a、简单易读的14段大屏彩色液晶显示
b、信息滚动文字显示
c、导航指南和导航键
d、用户自定义功能键
e、默认值可由用户设定
f、支持多语种(英语、西班牙语、法语、德语)
g、设计紧凑,进深65mm
3)控制功能:
a、梯形图顺控功能
b、精确可靠的控制算法
4)可靠性:3年质保
UT32A调节器选型:(尺寸:48*96mm)
| 型号 | 规格代码 | 附加规格 | 说明 | ||||
| UT32A | 数字调节仪(提供变送输出或15V DC回路电源、2个DI和3个DO)(电源:100- 240V AC) | ||||||
| 基本控制 | -0 | 标准型 | |||||
| -1 | 位置比例型 | ||||||
| -2 | 加热/冷却型 | ||||||
| 功能 | 0 | 无 | |||||
| 1 | RS-485通信(最快38.4kbps,双线制/四线制)(*2) | ||||||
| 2 | 2个附加DI和2个附加DO | ||||||
| 网络功能 | 0 | 无 | |||||
| 显示语言(*1) | -10 | 英语白色 | |||||
| -11 | 英语灰黑色 | ||||||
| -20 | 德语 | ||||||
| -30 | 法语 | ||||||
| -40 | 西班牙语 | ||||||
| 规格代码 | -00 | 始终为“-00” | |||||
| 选购件 | /LP | 24V DC回路电源(*2) | |||||
| /HA | 加热器断线报警(*3) | ||||||
| /DC | 电源24V AC / DC | ||||||
| /CT | 涂层(*4) | ||||||
| *1: | 引导界面可显示为英语、德语、法语和西班牙语。 |
| *2: | 可组合基本控制代码(“-0”或“-1”)和功能代码(“0”或“1”)指定/LP选项。此外,当功能代码为“1”时,RS-485通信为2线制。 |
| *3: | 当基本控制代码为“-0”或“-2”时,可指定/HA选项。 |
| *4: | 当指定/CT选项时,UT32A将不符合安全标准(UL和CSA)和CE认证。 |
常用型号举例:
UT32A-000-10-00 UT32A-100-10-00 UT32A-200-10-00
UT32A-000-11-00 UT32A-100-11-00 UT32A-200-11-00
UT32A-010-10-00 UT32A-110-10-00 UT32A-210-10-00
UT32A-010-11-00 UT32A-110-11-00 UT32A-210-11-00
UT32A-020-10-00 UT32A-120-10-00 UT32A-220-10-00
UT32A-020-11-00 UT32A-120-11-00 UT32A-220-11-00
技术指导专栏:
控制:
许多控制系统是以PI(D)控制功能为中心构成的。控制也称为优化控制或者先进控制,在仅使用PID控制器无法满足要求的情况下,可以考虑使用。
在选择控制方法时,要对包括控制的要求、经济性、过程的现状、传感器、操作端在内的整体系统进行全面的考虑。研究过程中,有时也会发现除改善控制方法以外的有效的解决方法。
不易进行控制的主要原因
时滞时间长、响应慢、响应性发生变化、存在积分性(液位等)、多个回路间相互耦合、无超调、外部干扰大等。
1) 时滞时间长的过程
除时滞时间长之外,时间常数与时滞时间的比值也决定着控制的难易度。
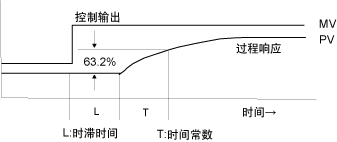
时滞时间长的过程响应
在PID控制中,L(时滞时间)/T(时间常数)的值在1以上时(时滞时间比时间常数大),很难进行控制。时滞时间不仅是指过程的时滞时间,还包括传感器及操作端的时滞时间。在分析仪中,采样装置的时滞时间会比较长。
2) 存在积分性的过程
是指蓄积液体及热量等的过程。一旦开始蓄积就不能返回原来状态,无自调节性的液位的流入控制等就是典型的例子。自调节性是指像锅炉一样,通过加热和散热的平衡调节来决定温度的过程。
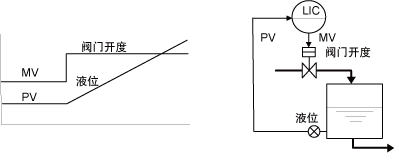
积分性大的过程响应
3) 响应慢的过程
例如: pH(由搅拌、混合、反应引起的延迟)控制、热容量大的锅炉的温度控制等。
在PID控制中,达到稳定前需要几个控制周期,如果控制周期为1小时,达到稳定有时需要4~5小时,所以就需要尽量缩短达到目标值和稳定运行的时间。
4) 响应性变化的过程
随着反应的进行而发生的黏度变化、发热(或者吸热)、催化剂活性变化、热交换器灰尘附着、品种改变引起的原料更换及混合比例变更等,都会导致响应性发生变化。
通常,PID控制的稳定性足以克服这些响应性的变化,但并非所有的情况都能克服。
5) 多个回路之间耦合强的过程
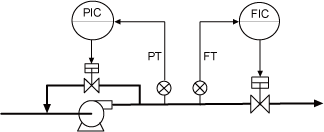
容易耦合的回路示例
上图是典型的相互耦合的例子。PIC和FIC的PI常数基本相同时,回路之间会发生耦合,变得不稳定。通常,将FIC的PI常数取值,降低PIC端的灵敏度,可以减少相互耦合产生的影响,使用解耦控制时,可以实现优异的控制。
6) 无超调的过程
有时即使短时间地超过限制条件范围,也会对产品质量产生重大影响。
例如,在生物反应器中,即使温度一时过高,也会造成杆菌及酵母菌等死亡。在这种情况下使用批量调节器或采用模糊控制的调节器。
下图批量调节器的示例中,最初手动预设值1接近设定值SV,当测量值达到SV-ΔE时,将手动预设值2作为初始值,切换为AUTO,防止超调的发生。
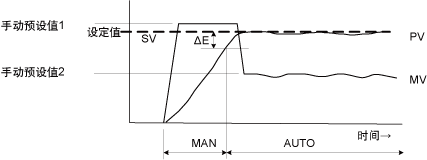
采用批量调节器防止超调的示例
在模糊控制中,温度上升时,自计算并设定比实际目标温度低的设定值,防止超调的发生。
7) 外部干扰大的过程
锅炉必须对蒸汽使用量的大幅度变化做出响应,是外部干扰大的过程的典型示例。在石油精炼厂中,更换油种(例如:阿拉伯原油和中国原油的组成有很大的区别)等也会造成很大的外部干扰。在蒸馏塔控制中,气温、风、直射阳光等造成的影响也是不能忽视的。热处理炉中的受热物质的装入/取出、排水处理中的排水流量及pH变化也是很大的外部干扰因素。因此,检测外部干扰量,并根据干扰量来改变操作量的前馈控制是很有效的。
外部干扰是指从控制回路外施加的变动因素,在流量控制回路中,调节阀的上游端及下游端的压力变动是主要的外部干扰。例如,调节阀的上游端压力上升时,即使阀的开度相同,流量也会增加。通过流量传感器检测出该流量变化,使用流量调节器将调节阀的开度减少,可消除压力上升的影响。
控制回路正是为了消除这些外部干扰的影响而存在的。

外部干扰示例